
计组-理论-MIPS处理器设计
处理器概述
对于CPU而言,其本质也是一个抽象的状态机,其体系结构状态对程序员可见。随着时钟周期指令的执行,CPU进行状态转移。组合逻辑进行功能的处理,时序逻辑进行状态的转移
- 状态=程序员可见的状态
- 次态=指令执行的规范
- 没有中间状态,每条指令对应一个状态转换
CPU的功能
CPU的功能:控制指令执行
指令的四种基本操作:取数、存数、传送、运算
- 取数:读取某主存单元的数据,并传送至某个寄存器;
- 存数:将某个寄存器中的数据存入主存某个单元之中;
- 传送:将某个寄存器中的数据传送至ALU或另一个寄存器;
- 运算:进行某种算术或逻辑运算,结果保存到某个寄存器中。
指令周期:CPU从指令寄存器中读出并执行指令功能的全部时间
- 取指周期:完成取指令操作和分析指令的所需时间
- 取数周期:从数据存储器读出操作所需的时间
- 执行周期:完成指令所规定的运算的所需时间
CPU的组成
分为数据通路、控制单元、总线
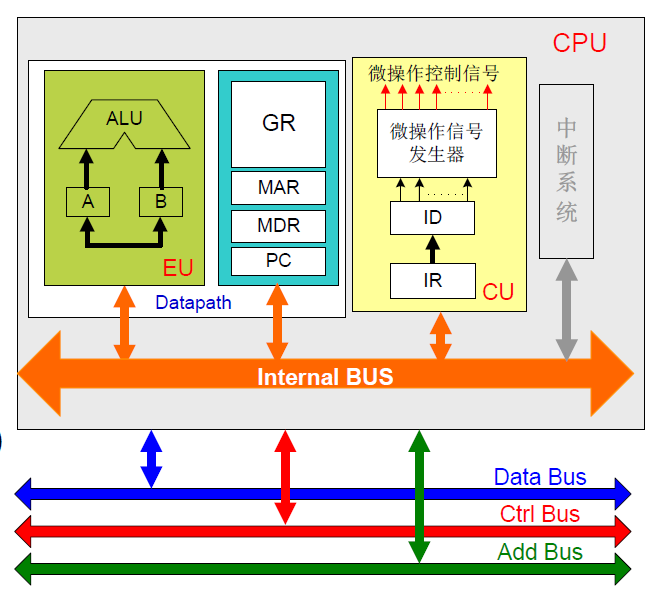
数据通路
数据通路(执行单元):包含了运算单元和寄存器单元
- 运算单元:ALU、译码器、多路选择器等
- 存储器、寄存器:通用寄存器组GPRs、标志寄存器FR、临时寄存器TR
控制单元
-
指令地址部件:程序计数器PC
-
指令寄存部件:指令寄存器IR
-
译码部件:指令译码器ID
-
时序部件:产生时序信号
-
控制信号生成部件:产生计算机及其他部件所需要的所有微操作的控制信号
控制信号是CPU的灵魂,对于不同的指令,数据通路都是相同的,指令执行的区别就在于生成的控制信号的不同
单周期CPU
对于一条指令,通常的执行流程为:(这也是MIPS处理器的5级分割法)
- 取指令:根据PC,访问指令存储器获得PC,然后PC=PC+4
- 读寄存器:根据指令格式,读取相应寄存器获取操作数
- ALU运算:通过ALU完成相应的算术逻辑运算
- 数据存取:
lw、sw访问数据存储器 - 写寄存器:进行写回操作
对于单周期处理器,所有指令的执行都在一个周期内完成,CPI=1。其间的操作可以认为是组合逻辑操作,没有时序逻辑,没有回路
数据通路设计
采用哈弗体系结构:使用指令存储区IM和数据存储区DM
先为每类指令设计单独的数据通路,再考虑合并,利用控制信号满足不同指令的个性化需求
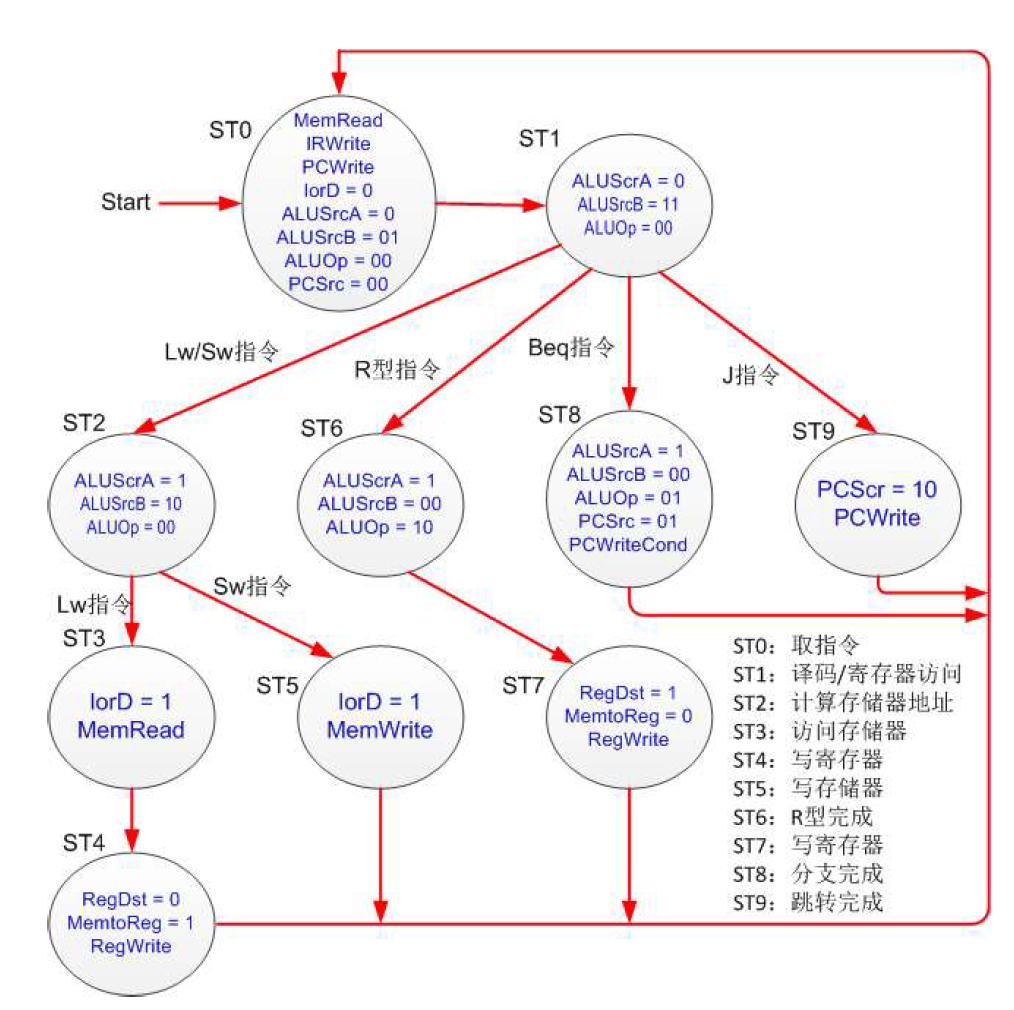
多周期设计
单周期最长的数据通路是lw的数据通路,但是极少有指令会有这么长的数据通路。不同类型的指令有着不同的指令周期,单周期的时钟周期去最长的指令的运行时间,造成了性能的浪费。
若采用可变时钟周期,性能提高,但是控制比单周期复杂困难,得不偿失。尝试采用多周期的设计方案。
多周期的方案将单周期中隐式的状态机转变为了显式的状态机,当前正在工作的部件即为当前的状态。
多周期处理器的CPI<1。下一个周期的控制信号可以在上一个周期生成,多周期通过这样的overlap隐藏延迟
流水线
流水线的核心思想是复用硬件,在每个时钟周期内数据通路上实际在执行多条指令,实现了指令的并行。
理想的加速比,是流水线的级数,称这种情况是线性加速比。一般情况随着级数增加加速效果增加下降
MIPS处理器分为5级:取指令、译码、执行运算、访存、写回。在不同级之间增加流水寄存器,当前指令的状态保留在寄存器中,随着时钟周期在数据通路中进行流动。指令执行的数据来源只能是流水寄存器/转发。
在下一个时钟沿到来的之前,需要准备好全部的数据
对同一个内存空间的访问,其实是一种通信方式
流水线冒险
也成为依赖或相关:在下一个时钟周期妨碍下一条指令执行的状况,指令之间有序的关系
- 结构冒险:多个阶段都会用到某个硬件资源
- 数据冒险:等待之前的指令完成数据读写
- 控制冒险:指令依赖之情分支执行的指令,无法确定执行哪一条指令
结构冒险
当处于两个流水段的指令需要同一个资源时会发生冲突
- 方案一:复制资源或提高资源的吞吐能力
- 将指令存储器和数据存储器分开:将普林斯顿结构改为了哈弗结构
- 对于GRF的读写问题,可以在时钟周期的前半段读,后半段写;也可以增加端口,使得能够同时实现读写
- 方案二:检测资源争用,使其中一个争用流水线的指令阻塞
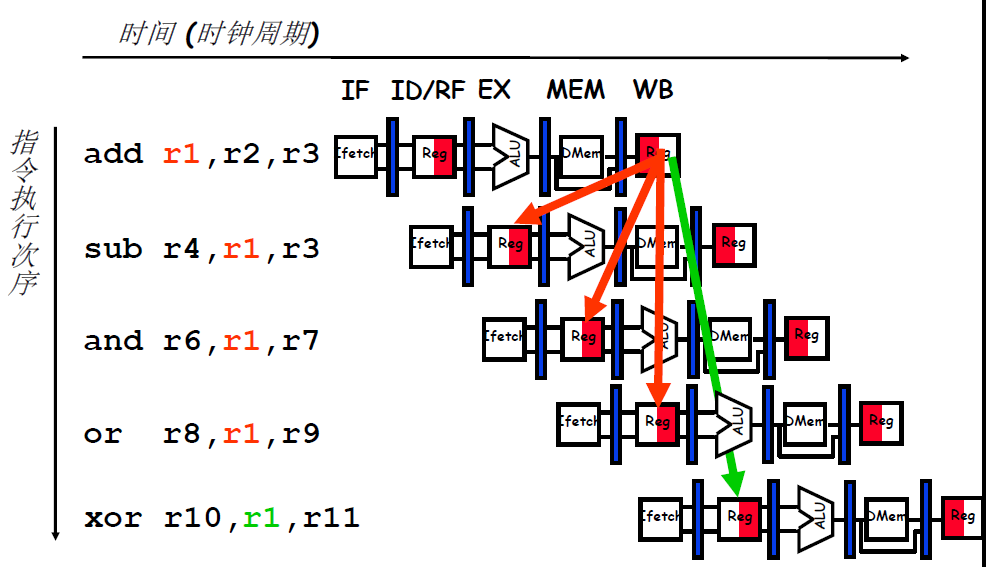
数据冒险
共有三种指令间的数据依赖关系:
- 写后读。又叫流相关,关于值的相关性,真相关
- 读后写。又叫换相关,关于寄存器名的相关性,伪相关
- 写后写。又叫输出相关,关于寄存器名的相关性,伪相关
读后写和写后读只要保证在前半周期读,后半周期写,也就是阻塞赋值,则不会出现问题。写后读才是真相关,是需要处理的问题。五种处理读后写的方法为:
- 等待并阻塞直到值在寄存器堆中可以访问
- 检测并转发/旁路数据给相关指令:变相解决了数据传递的问题
- 检测并消除相关性:软件层面,由编译器操作,进行指令重排等拉开距离
- 检测需要的值,“投机”执行,并进行验证
- 其它:细粒度多线程
- 切换线程,执行其他线程的不相干的指令
怎么检测:增加score boarding机制:
- 给GRF添加一个表项,用于标明当前指令是否要写该寄存器
- 如果下一条指令想要读被标记的寄存器,则延缓
- 在指令写后讲表项恢复,指令继续执行
解决策略:旁路/转发
数据已经在数据通路中被计算完成,但还没有写入目的地中,于是进行转发。(写回是流水线的最后一级)。增加数据通路,使得提前将运算得到的数据转发到需要处。
转发的对象应该是数据,数据流回到之前会带来风险,转发的来源只能是流水寄存器,这样可以避免毛刺等现象。对于无法转发的数据,则进行阻塞。判断依据为AT法
AT法和阻塞
对于阻塞操作,是所需要的数据还没又被计算出来,没法进行转发,于是进行阻塞,等待数据被计算出来。
判断数据什么时候被算出来使用AT法,即Address-Time,按照数据的目的地-时间进行区分。
对与流水线中的数据,是和指令相关的,流水线中各级执行的指令至多向寄存器堆中写回一个数据,这个数据有两个基本性质:写入和地址和产生的时间。而对于指令而言,其当下(在这个级中)需要的数据也有两个属性:读出的地址和需要的时间。
如果写入地址和读出地址相同,那么说明出现了数据冲突,需要尽可能地使用转发来解决。如果需要的时间>生成的时间,那么说明在需要之前就可以生成,可以进行转发,否则就需要阻塞。注意这里说的生成和需要,数据的对象都是流水寄存器,只有写入寄存器才算生成,来源也只能是流水寄存器。
则对于某一个指令的某一个数据需求,我们定义需求时间为:这条指令位于 D 级的时候,再经过多少个时钟周期就必须要使用相应的数据。例如,对于beq指令,立刻就要使用数据,所以。对于 add 指令,等待下一个时钟周期它进入 E 级才要使用数据,所以。而对于sw指令,在 E 级它需要GPR[rs]的数据来计算地址,在 M 级需要GPR[rt]来存入值,所以 ,。
我们可以归纳出的两条性质:
- 是一个定值,每个指令的是一定的;
- 一个指令可以有两个值。
对于某个指令的数据产出,我们定义供给时间为:当前位于某个流水级的某个指令,它经过多少个时钟周期可以算出结果并且存储到流水级寄存器里。例如,对于 add 指令,当它处于 E 级,此时结果还没有存储到流水级寄存器里,所以此时它的,,而当它处于 M 或者 W 级,此时结果已经写入了流水级寄存器,所以此时。
我们可以归纳出的两条性质:
- 是一个动态值,每个指令处于流水线不同阶段有不同的值;
- 一个指令在一个时刻至多有一个值(一个指令至多写一个寄存器)。
在阐述完所有的数学概念后,我们就可以利用这些概念来描述转发的条件:
- 当,说明需要的数据可以及时算出,可以通过转发来解决。
- 当,说明需要的数据不能及时算出,必须阻塞流水线解决。
对于阻塞,由于计算都是D级的指令,故阻塞的对象最晚也只能是D级中的指令。当阻塞时,给D级提供数据的流水寄存器维持原先值,即D即不载入新的指令;E级流水寄存器清空,D级的指令不往前走;F级无流水寄存器,来源是IFU提供的PC值,也维持不变。由于清空E级后,相当于指令变为了nop,故阻塞相当于在指令流中插入nop
控制冒险
控制相关/控制依赖:指令流依赖之前的指令
下一拍从PC中取出来的值是下一条指令的地址,所有的指令都和之前的指令存在控制相关
不同类型的分支处理的方式不同,分支的类型:
| 类型 | 取指令阶段能否判断是否跳转 | 下一个可能地址的数量 | 何时能解析出下一个取址的地址 |
|---|---|---|---|
| 条件分支 | 不知道 | 2(PC+4或者跳转的地址) | 执行(寄存器相关) |
| 无条件分支 | 总是发生跳转 | 1 | 译码:PC+offest |
| 调用 | 总是发生跳转 | 1 | 译码:PC+offest |
| 返回 | 总是发生跳转 | 多 | 执行:寄存器相关 |
| 间接分支 | 总是发生跳转 | 多 | 执行:寄存器相关 |
处理控制冒险:关键在于使流水线保持充满正确的动态指令序列
当指令是控制指令的可能的解决方案:
-
停顿流水线直到得到下一条指令的取值地址
-
猜测下一条指令的取址地址:分支预测
- 猜错的可能性是多大?猜错的损失是多大?预期等待,不如塞入PC+4的指令,猜测继续执行指令
- 猜对了,没有乘法;猜错了,两个气泡
- 20%的控制指令,70%的控制指令发生跳转,CPI=1+0.2*0.7=1.28
- 去掉不必要的控制指令
- 分支判断提前:提前处理分支条件和获得目标地址
- 但是CPI减小了,时钟周期却可能拉长了
- 猜错的可能性是多大?猜错的损失是多大?预期等待,不如塞入PC+4的指令,猜测继续执行指令
-
采用延迟技术:分支延迟槽。无论是否跳转,总是执行下N条指令
- 插入延迟槽的操作由编译器实现,往往插入
nop - 目前的操作就是引入延迟槽,在D级即引入单元判断是否跳转,F级已经取出的指令继续执行。看似解决了问题,但是如果判断需要的数据无法转发,需要进行阻塞,则还是没有办法,不是解决问题根本方法
- 插入延迟槽的操作由编译器实现,往往插入
-
其他:细粒度多线程
-
消除控制指令:推断执行
-
从所有可能的方向取址:多路径执行
分支预测
分支预测是时刻在进行的,不是只有出现分支指令后才开始进行。在取指阶段进行三件事:
- 是否为分支指令
- 分支的方向
- (如果跳转)分支的目标地址
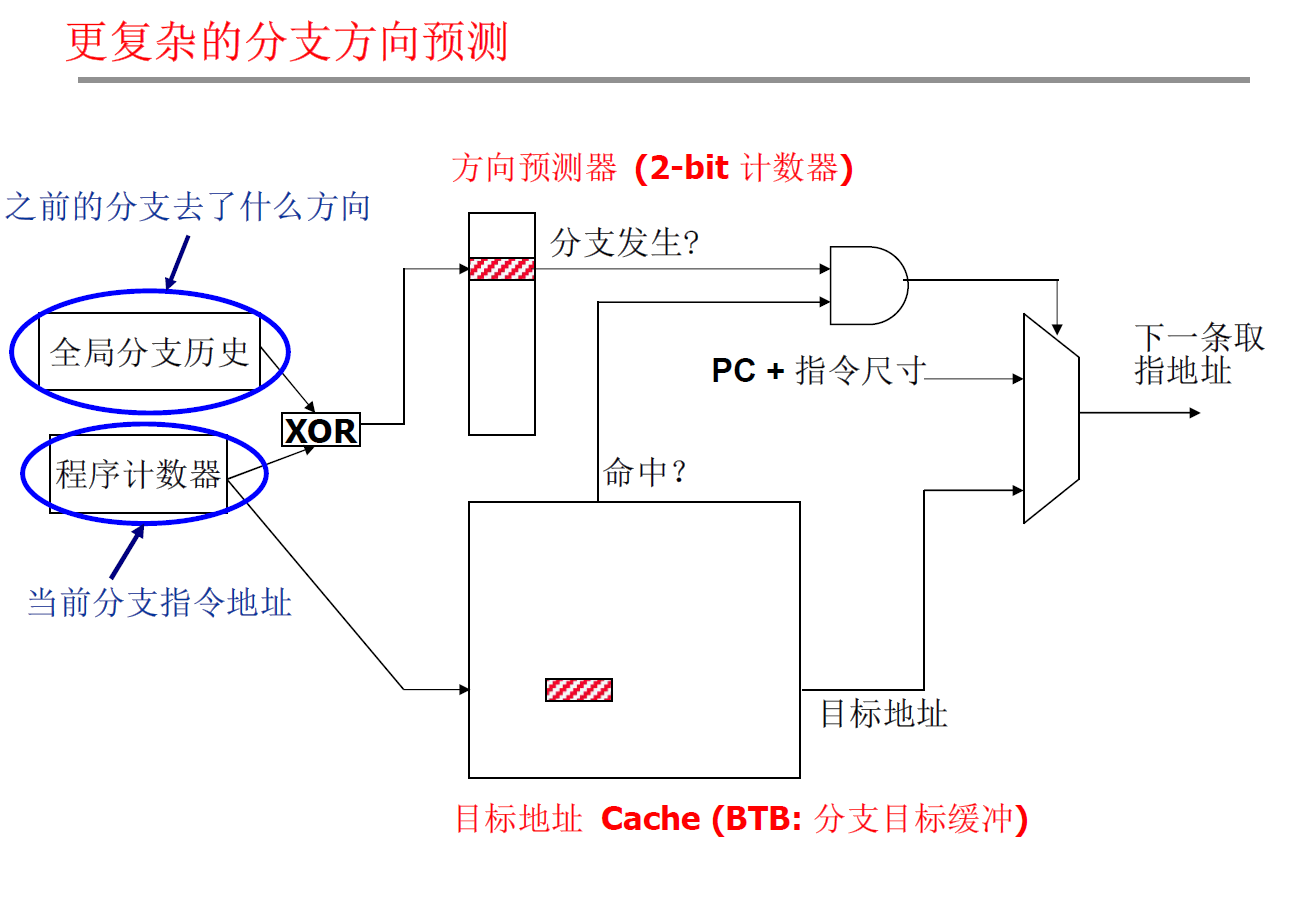
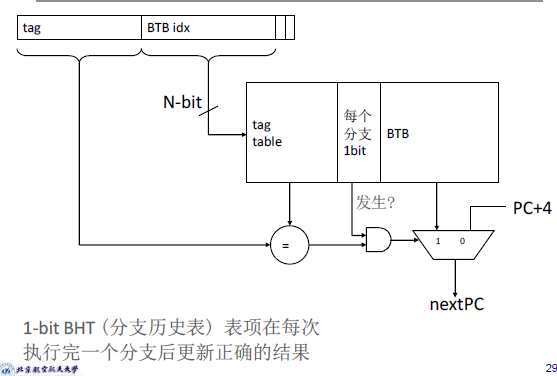
分支目标缓冲BTB
一种朴素的思路:每次跳转到地址可能是相同的(如循环)。存储当前实例的目标地址,由PC访问之。
静态分支预测
- 总是不发生
- 实现简单:不需要BTB,不需要进行分支预测,只需要阻塞
- 准确率低:只有30~40%
- 编译器可以重新布局代码,使可能路径成为不发生的路径
- 总是发生
- 无方向预测:反向/正向
- 准确率较高,反向分支通产会发生
- 反向发生,正向不发生:BTFN
- 预测loop反向分支发生,其他不发生
- 基于剖析(可能的方向)
- 编译器通过运行分析代码为每个分支决定可能的方向。分支指令编码增加一位代表可能的分支方向
- 分析代码如果有代表性则预测的比较准确,依赖于分支的动态行为
- 基于程序分析(可能的方向)
- 使用基于程序分析的启发式方法来确定静态预测的分支方向
- 基于程序员:程序员手动提供静态分支的预测方向,通过
pragma著名- 程序员对程序更熟悉,但会增加程序员负担
- 现代编译器和CPU的预测能力好于程序员
动态分支预测
运行时采集信息,基于动态信息进行预测。预测能力更强,但需要额外的硬件
-
Last time预测器:总是预测上一次的方向,每个分支1bit代表方向-
类似于一个状态机,进行发生-不发生之间的预测转换
-
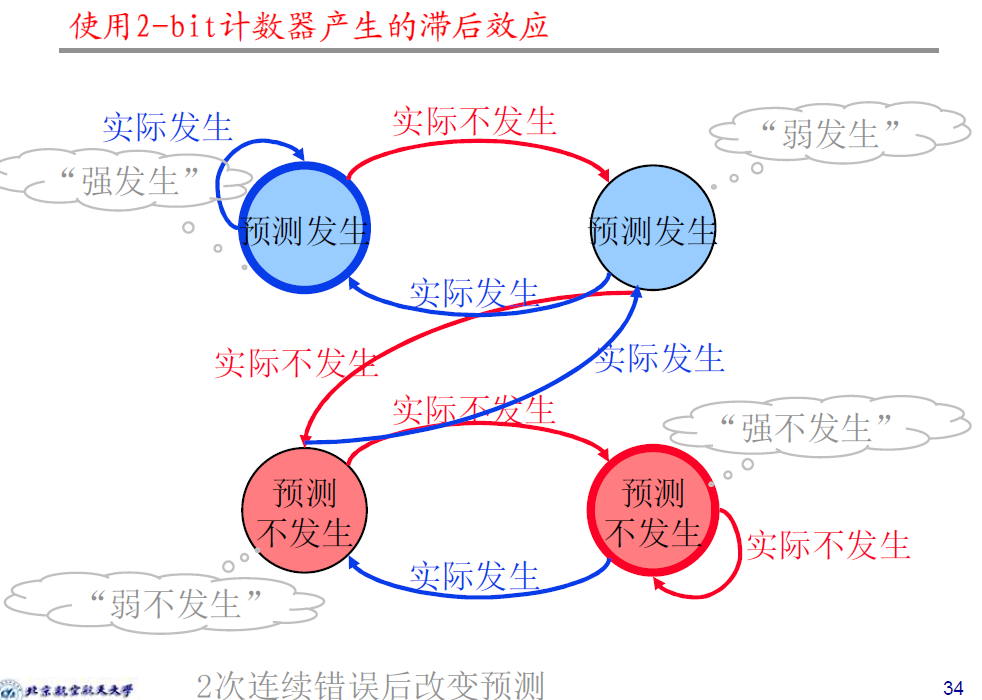
为了应对可能的转换太快的效果,为预测器增加滞后效果,多次同分支后才改变预测方向
-
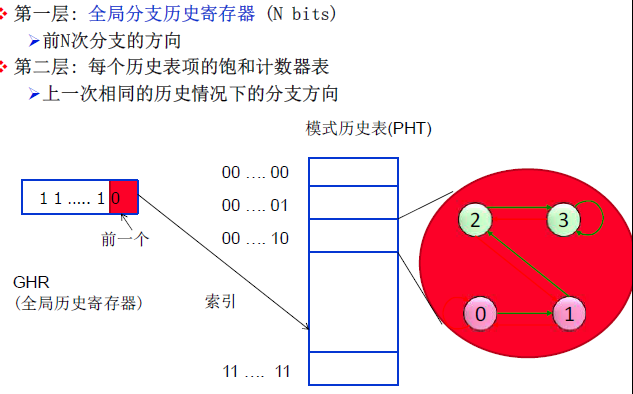
全局分支相关
全局分支相关:一个分支的结果可能和其他分支的结果相关
将分支结果和所有分支的全局T/NT历史关联,根据上一次相同全局分支历史的分支结果做出预测
- 使用全局历史寄存器GHR跟踪所有分支的全局T/NT历史
- 将GHR索引为一张表,记录过去和GHR中相应的分支的结果->模式历史表
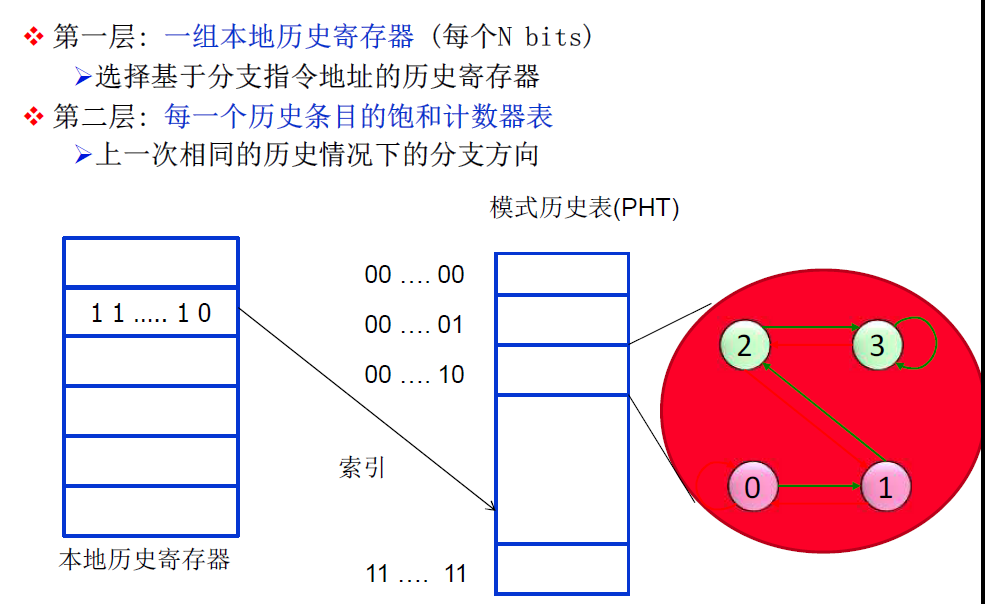
本地分支相关
本体分支相关:一个分支的结果可能和同一个分支过去的结果相关
本地分支预测器:每个分支都有一个历史寄存器,记录该分支过去历史发生/不发生的关联
混合分支预测器
使用不止一种类型的预测器,采用多种算法,选择最佳的预测
流水线工程化方法
流水线:以性能为目标的标准流水线
- 数据冒险:转发、阻塞
- 控制冒险:分支比较迁移,转发、阻塞
三控制架构:
- 功能部件控制:译码单元
- 暂定(阻塞)控制器
- 转发控制器
中断和异常
IO的速度差异很大:

处理器要为IO做什么:
- 输入:读字节序列
- 输出:写字节序列
有些处理器有单独的输入输出指令。在MIPS中用load实现输入,store实现输出,以一部分的地址空间作为输入输出谁被的通信通道,这部分内存被关联到设备的寄存器(控制寄存器、数据寄存器)(共享地址的读写是一种通信的手段)。
通向设备的数据通路上通常有两个寄存器:控制寄存器和数据寄存器。分别用来确认是否读写和暂存数据。处理器周期性查询控制寄存求(轮询),等待设备置位(ready bit 0->1),接着load或store数据到数据寄存器中。
当外部设备增加后,处理器频繁的轮询会使得处理器陷入一种“自旋等待”状态,因而可以改为当IO设备准备就绪时调用相关的过程:异常。通过异常机制触发IO,然后在IO进行数据传输时中断程序
- 异常:处理器内部产生,一旦检测出来立即处理(如溢出、系统调用、为定义的op)
- 中断:来自外部IO设备,“方便的时候处理”(除非高优先级)
处理异常
MIPS中异常由系统控制协处理器CP0处理,保存出问题或被中断的的指令的PC内容。
- 保存出问题或被中断的指令的PC的内容
- 保存问题的描述:MIPS中保存到特殊的
cause寄存器中,编码为问题类型 - 跳转到异常处理的代码,起始地址为
0x8000_0180 - 通知OS:杀掉程序或者切换到另一个进程
可重启的异常
可重启的异常:流水线能够清空指令,处理程序的执行,执行完毕返回指令,以重新取址和执行。PC+4保存在EPC寄存器,用于识别导致异常的指令(使用PC+4是因为是流水线数据通路中可以获得的指令)。
处理程序的动作
读cause寄存器,传递给相应的处理程序
- 如果异常可重启,执行正常的操作然后使用EPC返回程序
- 否则结束程序并使用EPC、cause寄存器等信息报告错误
IO中断
IO中断是异步的,随时可能发生,和指令无关。异常是相对指令执行的,中断可以在任何指令执行的过程中发生。
异常一定要处理,中断可以不处理,也不会阻止任何指令的执行
中断驱动的数据传输:
- IO引发的程序中断
- 保存当前指令执行的PC+4
- 跳转到中断处理程序的地址
- 执行中断相应的数据传输程序
- 跳转回到用户执行的程序指令
协处理器
共有4个协处理器:SR,cause,EPC,PRId,寄存器编号分别为12,13,14,15
-
SR:用于对系统进行控制,指令可读可写-
IM7-2[15:10]:6位中断屏蔽位,分别对应6个外部中断:1/0表示是否允许中断 -
IE:全局中断使能:是否允许中断 -
EXL:异常级:1表示进入异常,不允许再中断,0表示允许中断。重新进入需要OS的配合,尤其是堆栈
-
-
cause:指令读取,硬件控制写入-
IP7-2[15:10]:对应外部的6个中断源,记录当前哪些硬件中断正在有效 -
ExcCode[6:2]:异常/中断类型编码值,共32种
-
-
EPC:用于保存异常/中断发生时的PC-
eret:中断/异常服务程序返回指令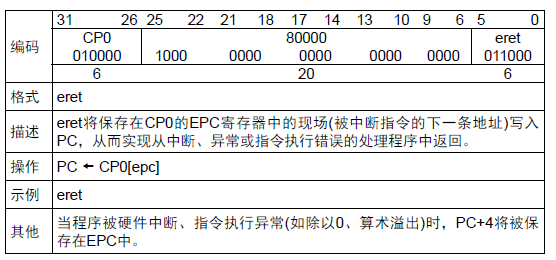
-
-
PRId:处理器ID,可以用于实现个性的编码
流水线的异常处理
在流水线的每一级,都可能发生异常
- F:PC地址异常
- D:
op非法 - E:运算过程种溢出
- M:数据地址异常
流水线的收益来自于指令执行开销的重叠,当指令流突然中断的时候(发生异常)会产生错误。
许多的异常必须是精确的,当一个异常是精确的时(同步并且可在断点处恢复)。所有在出错指令之前的指令必须完成,出错指令和它之后的所有指令必须被销毁(清空),异常处理程序必须开始执行。
通常不适宜在异常发生的周期中立即处理异常,因为
- 同一个周期内可能发生多个异常
- 在不同的流水段处理异常会比较复杂
- 异常处理必须按程序处理的序而不是时间序
通常,当异常发生时标记它并记录导致异常的原因,保持“安静”直到指令流水到写回阶段再处理,以尽量不影响流水线整体的执行。
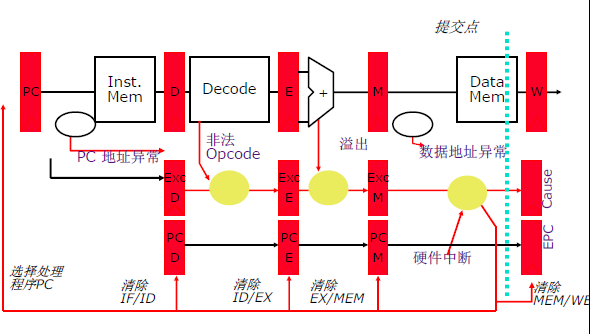
对于五级流水线,异常处理的步骤为:
-
在流水线种保持异常标志知道提交点(W级)
-
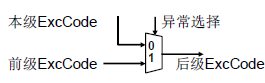
前级的异常优先级>本级的异常优先级。通过硬件MUX实现异常的传递
-
中断的优先级高于异常
-
异常到达提交点时,更新
cause寄存器和EPC寄存器,清空所有流水段(在提交点,之前的指令都已经执行完毕,之后的指令由于异常发生不能执行),向取指令阶段注入处理程序的PC -
对于PC段,在异常发生时,注入异常处理程序段的PC值
- 系统复位时:
0xBFC0_0000 - 硬件中断时:
0xBFC0_0400 - 其他异常时输出:
0xBFC0_0380
- 系统复位时:
软件实现的中断服务程序
基本框架结构:保存现场、中断处理、恢复现场、中断返回
- 保存现场:将所有的寄存器数据都保存到堆栈中
- 中断处理:读取特殊寄存器了解具体的中断类型并执行相应的处理策略
- 恢复现场:从堆栈中恢复所有寄存器的值
- 中断返回:执行
eret指令,从中断处理程序返回用户程序执行的指令
中断相应机制
保存PC、跳转、关中断,需要在同一周期内完成
- 保存:将PC(实际储存的是PC+4)和
ExcCode保存在EPC和cause中 - 跳转:跳转到异常处理程序段
- 关中断:
EXL置位,防止再次进入
恢复PC、开中断,需要在一个周期内完成
- 恢复PC:将EPC写入PC
- 开中断:清除EXL,允许再次产生
CP0模块
指令mfc0,mtc0可以读取、写入CP0寄存器,获取相应的信息
MFC0:读取CP0寄存器至通用寄存器
SR:获取处理器的控制信息Cause:获取处理器当前所处的状态EPC:获取被异常/中断的指令地址PRId:读取处理器ID(可以读取你的个性签名)
MTC0:通用寄存器值写入CP0寄存器
SR:对处理器进行控制,例如关闭中断EPC:操作系统中用于多任务切换
精确异常
流水线的收益来自于指令的叠加,许多异常必须是精确的:
- 在出错之前的指令必须完成
- 出错指令和之后的指令必须消费,不得提交结果
- 异常处理程序必须开始执行
经过封装,使得在程序员看来,CPU是冯诺依曼结构,流水线和单周期不应该有功能上的区别,只应该有速度上的区别。在准备处理异常/中断时,体系结构状态应该是一致的(回收=提交=执行完毕并更新体系结构状态)
- 所有之前的指令必须完全回收
- 之后的指令一律不得回收
对于多周期:不是所有指令花费时间相同:如cache缺失等。有多个不同的功能单元,会花费不同数量的时钟周期
- 能够独立的指令在不同的功能单元上,在前序的长延时指令执行完毕之前就开始执行
- 但是这样在指令角度会出现后进入的指令先执行完的情况,在程序员角度是不可接受的
保证精确异常:思路为使每个操作花同样的时间
缺点:访存操作可能不知道花多少时间(cache缺失)
现代CPU简介
现代CPU引入了多种特性,包括分支预测、乱序执行等等,达到了可怕的信念
重排序缓冲
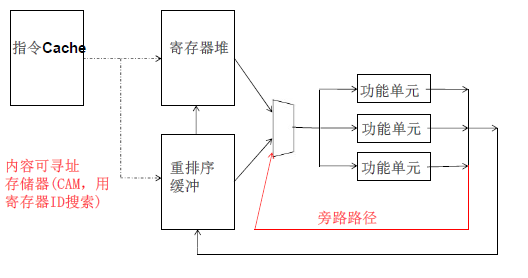
乱序执行指令,在产生体系结构可见状态之前按照PC执行进行重排序。
在指令译码时在ROB中预留一个条目,在指令执行完成后,将结果写入ROB的相应条目。类似队列,当指令成为最旧且执行完的一条,则出队,将结果移动到寄存器或存储器。
寄存器的值可能在寄存器中、数据通路中,也可能在ROB中。在访问数据时,先访问寄存器堆,如果其中数据无效,则寄存器堆存储ROB中包含相应值的条目ID,将寄存器映射到ROB中,再访问ROB
使用ROB的按序执行流水线:
- 译码:访问寄存器堆/ROB,检查指令是否可执行,是则分发指令
- 执行:可以按照完全的乱序执行
- 完成:将结果写入ROB
- 回收/提交:检查异常,如果没有则将结果写入体系结构寄存器/存储器;若有,则清空流水线并启动异常处理程序
按需分发/执行,乱序完成,按需回收
可以较简便地解决精确异常,但是访问ROB会增加延时和复杂性
历史缓冲
指令执行完成后更新寄存器堆,有异常发生时撤销更新
- 译码时保留一个HB条目
- 当指令执行完毕后,将目标地址的旧值存在HB中
- 当指令时HB中最旧的一条且没有发生异常/中断,丢弃该HB条目(和重排序最大的不同)
- 当指令时HB中最旧的一条且有异常需要处理,则将HB中保存的旧值依次写回到体系结构状态
和重排序相比,都是乱序执行,最后根据指令的先后更新体系结构的状态,一个是写(更新)值,用了队的思想;一个是只保留最新的改变,否则利用栈思想复原
好处是寄存器堆中保留有最新的值,访问HB不在关键路径上。坏处是需要读目的寄存器的旧值,在异常时需要回滚HB,增加异常/中断处理的时延。
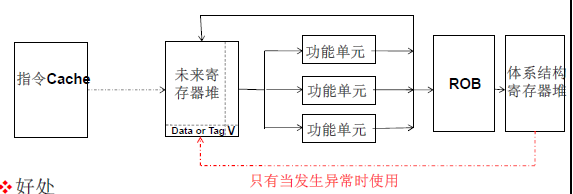
未来寄存器堆FF+ROB
维护两个寄存器堆:投机的和体系结构的。两个寄存器堆更新寄存器堆的状态的策略不同,一个是最旧,一个是最新
- 体系结构的寄存器堆:按程序序更新以获取精确异常,使用ROB来保证按序更新
- 用于恢复当异常发生时的状态恢复
- 未来的寄存器堆FF:如果一条指令是最新的一条写入寄存器的指令,则执行完毕后立即更新
- 可以用来快速访问最近的寄存器值(投机的状态)
好处是不需要从ROB中取值,坏处是使用了多个寄存器堆,发生异常时需要从一个堆向另一个堆复制数据
- 译码(D):访问FF,在ROB中分配条目,检查指令是否可以执行,是则分发指令
- 执行(E):指令可以完全的乱序执行
- 完成®:将结果写入ROB和FF
- 回收/提交(W):检查异常;如果没有,将结果写入体系结构寄存器堆或者存储器;如果有,清空流水线并启动异常处理程序
按序分发/执行,乱序完成,按序回收
当最旧的准备回收的指令被检查出导致了异常, 控制逻辑
- 恢复体系结构状态(寄存器堆, IP/PC, 存储器)
- 清空流水线中所有比该指令新的指令
- 保存IP/PC和寄存器堆(ISA指定)
- 重定向取指引擎指向异常处理子程序
- 异常向量
存储器和寄存器的区别
- 寄存器的相关是静态可知的– 存储器的相关是动态决定的
- 寄存器的状态空间小– 存储器的状态空间大
- 寄存器状态对其它线程/处理器不可见– 存储器状态在线程/处理器之间是共享的(共享存储多处理器)
乱序执行:动态指令调度
一个真正数据相关会使流水线停止分发(将指令送入功能单元的动作)新的指令到功能单元
取址译码不能停,但有些指令无法执行,乱序执行的思想是找一个指令让指令阻塞在那,独立的指令先在流水线上执行
监控休息区中每条指令的数据来源,当数据可用时,则分发该指令执行,指令按照数据流序(非控制流序)执行
